Introduction
Souvenons-nous du premier PC que nous avons monté : beaucoup de lecture préalable sur les divers sites et forums, suivi d’une prise de confiance. Pour bon nombre d’entre nous, cette confiance a probablement pris un coup dans l’aile dès lors qu’il a fallu commander les divers composants. On en vient à se demander si c’est bien de tel composant dont on a besoin, quitte à dégainer sa carte bleue sans être complètement sûr de soi.
Une fois tous les composants réunis et disposés sur une table, nous avons tous ouvert les boites une par une en prenant particulièrement soin du processeur, de la carte mère, des barrettes de mémoire et de la carte graphique. Souvenons-nous aussi des efforts déployés pour ne pas toucher la surface d’échange du processeur et du dissipateur. Les plus méticuleux sont peut-être allés jusqu’à acheter un bracelet antistatique. Toutes proportions gardées, il y avait de quoi se sentir comme un chirurgien préparant une opération.
Ce processus a pu être géré en quelques heures pour certains et quelques jours pour d’autres, mais le fait est que nous sommes arrivés à monter notre premier PC. S’en est suivi ce fameux moment où l’on appuie un peu fébrilement sur le bouton d’alimentation pour voir la configuration démarrer du premier coup … ou pas. Dans le second cas, il aura fallu déployer des efforts plus ou moins conséquents pour résoudre les problèmes avant d’avoir un PC fonctionnel … et ensuite passer à la configuration logicielle.
Suivant la période à laquelle ce premier montage s’est fait, on a pu découvrir les univers de la configuration BIOS et système d’exploitation, sans oublier l’installation des pilotes qui constituaient autant d’expériences à part entière. Depuis, ce processus a été très largement simplifié. Pour notre part, nous nous souvenons encore d’avoir eu à démarrer DOS depuis une disquette, configurer une carte série pour souris cavalier par cavalier ou encore disposer les puces de RAM à même la carte mère.
La même excitation …
Toutes ces sensations nous sont revenues lors de nos recherches, études de marché et achats de composants en vue d’assembler notre premier drone quadricoptère : un Discovery Pro de Team BlackSheep.

Les habitués des multirotors penseront probablement que nous avons visé bien trop haut pour un premier quadricoptère, ce qui n’est pas faux : après tout, on ne confie pas les commandes d’un Rafale à quelqu’un qui vient de se mettre au pilotage. Si c’est votre premier drone, nous vous conseillons plutôt de vous tourner vers des solutions clés en mains, comme les Parrot AR.Drone ou Bebop.
Dans notre cas, nous savons nous débrouiller avec un fer à souder, le montage des PC n’a plus aucun secret et nous avons piloté des avions radiocommandés plus jeunes – autant d’ingrédients pour une confiance mal placée. Quoi qu’il en soit, l’article que nous avons publié en juin dernier a permis de jeter les bases pour ce que nous allons voir aujourd’hui.
Avant la publication de ce premier article, nous avons beaucoup lu, ajouté des composants dans nos paniers sur plusieurs sites, posé des questions pour retourner à la case départ. La communauté autour des multirotors étant assez modeste par rapport à celle qui porte sur l’assemblage des PC, il est parfois plus dur de trouver des réponses. De plus, des marques comme Team BlackSheep sont suffisamment occupées à développer leurs produits et les vendre : nos mails sont restés lettre morte pour la plus grande majorité. Bref, il a fallu compter sur nous-mêmes à plusieurs reprises.
Après quelques mois d’hésitation sur les composants, le temps était venu de passer à l’acte ou de jeter l’éponge.
La commande en détail
| Team BlackSheep Discovery Pro Long Range Set | |
|---|---|
| Composant | Prix au 10/11/14 |
| TBS Discovery Pro Long Range Set | 2349,95 $ |
| Option Naza-M V2 | 130 $ |
| Option TBS 69 FPV Camera | 70 $ |
| Batterie supplémentaire | 74,95 $ |
| Option batterie supplémentaire 4.5Ah | 25 $ |
| Option batterie incluse 4.5Ah | 25 $ |
| Option réglages VTx | 100 $ Plus disponible : le kit inclut désormais TBS Unify VTx |
| Option réglages VRx | 80 $ |
| Option TBS Groundstation 2,4GHz | 130 $ |
| Option moteurs 1000kV | 20 $ |
| Total | $3004.90 hors fdp/2347,44 € fdpin (depuis Hong Kong) |
Nous avons donc acheté tous ces composants directement sur le site de Team BlackSheep, sachant tout de même qu’il existe plus d’une boutique française qui les propose, ainsi que bon nombre de pièces compatibles fabriquées par d’autres marques. À vrai dire, nous avons tout simplement opté pour l’approche la plus simple (mais pas nécessairement la plus économique, notamment en raison des droits de douane), espérant ainsi profiter de l’expérience de la marque sur son créneau. L’inconvénient, c’est que nous avons subi les délais d’approvisionnement de Team BlackSheep : il a fallu presque un mois et demi pour que notre commande parte de chez eux. À leur décharge, le paysage des multirotors a beaucoup évolué à cette période, ce qui a entrainé plusieurs changements dans notre commande. Concrètement, la radiocommande Futaba initialement commandée a été remplacée par une FrSky Taranis 9XD, avec remboursement de la différence. Nous avons bénéficié d’une mise à niveau gratuite pour les moteurs, TBS ayant sorti son modèle 1000 kV et épuisé la référence 900kV que nous avions choisie à la base. Enfin, suite à une rupture de stock sur les moteurs de nacelle, TBS nous a envoyé un second colis à réception des produits, sans frais supplémentaires. Le suivi client post-vente de la marque mérite d’être salué.

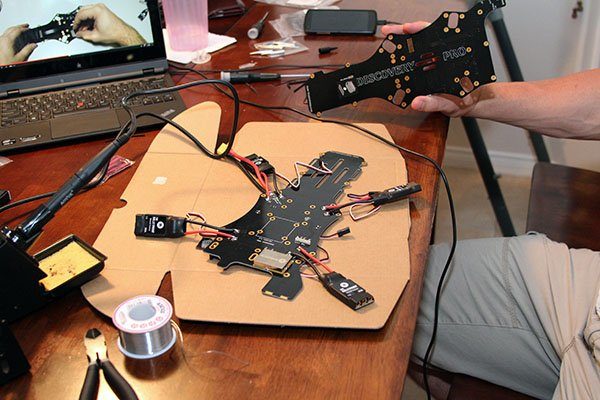
Quelques semaines après avoir passé commande, nous nous sommes donc retrouvés en face d’une pile de boites: composants pour le Discovery Pro lui-même, composants pour émission/réception, équipement FPV et Groundstation (émetteur/récepteur multifonctions au sol avec écran LCD 4 pouces). Ne restait plus qu’à se refamiliariser avec les modes d’emploi avant d’attaquer le montage.
TBS Discovery Pro
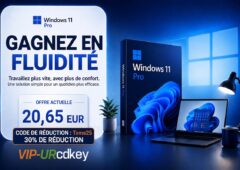
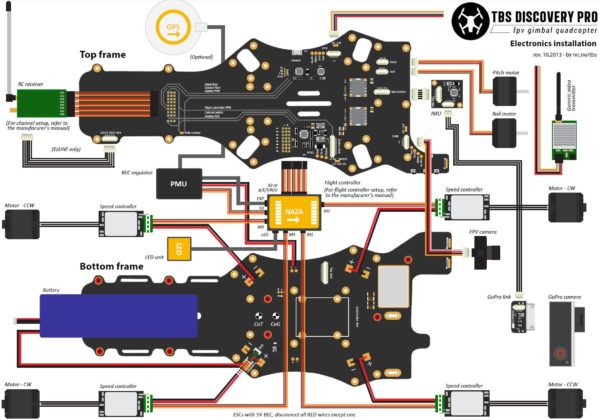
Le Discovery Pro est en quelque sorte la base sur laquelle nous avons construit notre multirotor : celui-ci se résume à une plaque inférieure et une plaque supérieure avec plusieurs sous-systèmes intégrés, dont le module d’affichage à l’écran CORE, un contrôleur sous licence AlexMos pour la nacelle et un sélecteur de caméra.
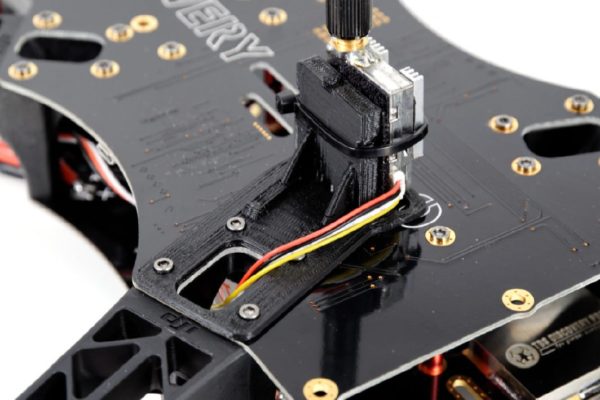
Bien entendu, la nacelle en aluminium de TBS est une pièce essentielle puisqu’elle permet d’installer une GoPro sur le quad pour filmer des contenus en haute définition. L’élimination, ou tout du moins la plus forte réduction possible des vibrations étant essentielle pour un flux vidéo de bonne qualité, TBS propose un total de 35 pièces antivibrations en silicone (plusieurs niveaux d’élasticité sont proposés). On trouve par ailleurs une carte de sortie vidéo sur laquelle la GoPro vient se brancher, deux moteurs à entrainement direct pour le contrôle vertical/horizontal de la GoPro ainsi qu’un composant de mesure à inertie propre à ma marque. Tous les câbles, vis, entretoises et roulements qu’il est nécessaire d’assembler sont inclus.

Il est possible de commencer avec ce kit de base (TBS Discovery Pro gimbal frame) pour un peu moins de 500 euros, puis ajouter des composants d’autres marques. Nous avons préféré rester sur le site de la marque pour ajouter quelques-unes des options proposées : afin d’être utilisé, le kit de départ nécessite des bras auxquels on attache moteurs et hélices, quatre contrôleurs de vitesse pour ces mêmes moteurs, un contrôleur de vol, une batterie, l’équipement de réception/transmission pour les commandes de vols, les composants de réception/transmission pour la vue subjective et enfin la GoPro (pour peu que l’on compte filmer).
Bien entendu, cela fait beaucoup d’éléments à ajouter et la facture s’en ressent. Ceci étant dit, TBS s’appuie sur son offre de base pour proposer quelques packs qui ont au moins le mérite d’assurer la compatibilité des composants. Au-delà du kit de base et des possibilités d’autonomie (endurance) améliorées, on peut acheter le Discovery Pro sous forme de pack complet (Starter set) ou pack complet à longue portée (long range set). Pour bien saisir la différence, souvenons-nous du précédent article (ou même des connaissances que l’on peut avoir en Wi-Fi) : les basses fréquences tendent à franchir les obstacles plus facilement. Le Starter set propose ainsi une liaison vidéo 5,8 GHz et un pilotage sur la bande 2,4 GHz, tandis que le long range set s’appuie sur la fréquence 2,4 GHz pour la vidéo et un module 433MHz EzUHF pour le pilotage. Comme nous avons voulu nous faire plaisir, nous avons choisi la deuxième configuration.
Par rapport au kit de base, le long range set inclut quatre bras Flame Wheel F450, un contrôleur de vol DJI Naza Lite avec module GPS, quatre moteurs 900 kV, quatre contrôleurs de vitesse TBS Bulletproof, des hélices Graupner, une radiocommande FrSky Taranis X9D, un module transmetteur EzUHF, une batterie LiPo TBS 4S 3.3A, un chargeur, une caméra TBS 59 FPV, des lunettes Fat Shark Dominator, un récepteur Lawmate, un transmetteur vidéo TBS Unify 2,4 GHz, une batterie LiPo TBS 3S 5 Ah pour Groundstation, un support VTX Flame Wheel ainsi qu’une série de petites pièces indispensables comme les extensions servo, sangles velcro et connecteurs. La liste est longue et les utilisateurs les plus avertis qui ont pour habitude de choisir eux-mêmes leurs composants un par un trouveront sûrement à y redire.

Tous les composants du long range set ne sont pas nécessairement les meilleurs de leur catégorie : bien que l’on soit déjà proche des 2000 € de budget, TBS propose une longue liste d’options qui méritent considération. Il est ainsi possible de passer au modèle supérieur pour le contrôleur NAZA et la caméra, ajouter une batterie supplémentaire pour le multirotor, passer à une batterie de plus grande capacité, augmenter la portée au prix de l’agilité, faire paramétrer les composants par TBS, prendre des moteurs plus puissants ou encore passer à des antennes proposant une meilleure portée. Nous avons quasiment tout validé au point que le prix final s’approchait des 2500 euros. À vrai dire, la seule option que nous avons délibérément écartée est le montage et la configuration du Discovery Pro, puisque nous voulions partager notre expérience sur ces deux points quoiqu’il se passe.
Montage
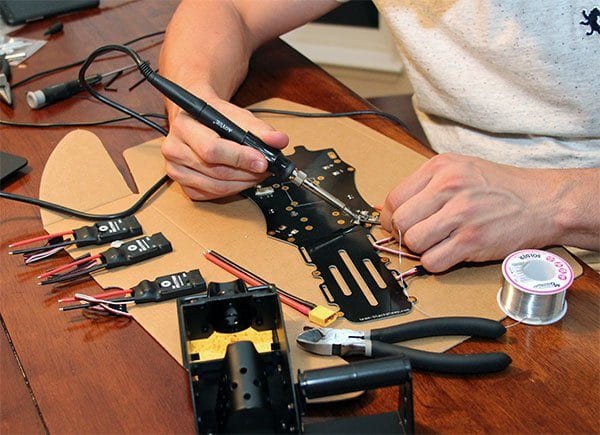
Quelques outils sont nécessaires avant de s’amuser : nous avons donc déniché un fer à souder de qualité, des serre-câbles, du frein-filet pour les vis et enfin un équilibreur d’hélices. Après avoir réuni tous les composants du pack Discovery Pro sur une table, l’assemblage du quadricoptère a pu commencer.
La première étape consiste à assembler la nacelle à moteurs brushless (sans balais). Comme nous l’avons évoqué précédemment, les vibrations doivent absolument être minimisées pour que le flux vidéo soit propre. TBS est bien conscient de cette priorité et fournit donc plusieurs sachets de pièces en silicone plus ou moins élastique. Avant de voir ce qui ressemble de près ou de loin à un multirotor, on passe ainsi une ou deux heures à faire renter ces pièces dans les plaques de montage.
Team BlackSheep propose un guide de montage assez correct (en anglais seulement) que nous ne reprenons donc pas ici point par point. Pour peu que l’on arrive à suivre les instructions, ce qui semble complexe est divisé en sous-parties et rendu plus accessible grâce aux nombreux commentaires ainsi qu’aux illustrations de qualité. Notre seul reproche tient au fait que la lecture de ce document PDF ne peut pas être faite de concert avec le tutoriel que TBS propose sur YouTube : il faut choisir l’un ou l’autre, sauf si l’on tolère les multiples allers-retours.
Fort heureusement, un utilisateur de fpvlab.com a récemment posté plusieurs heures d’explications pour combler les manques. Nous avions déjà terminé l’assemblage lorsque nous sommes tombés sur ces vidéos mais il est clair qu’elles auraient parfaitement complété la documentation officielle.
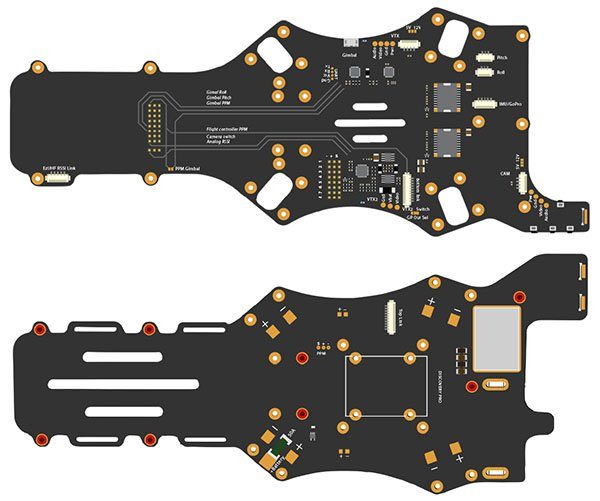
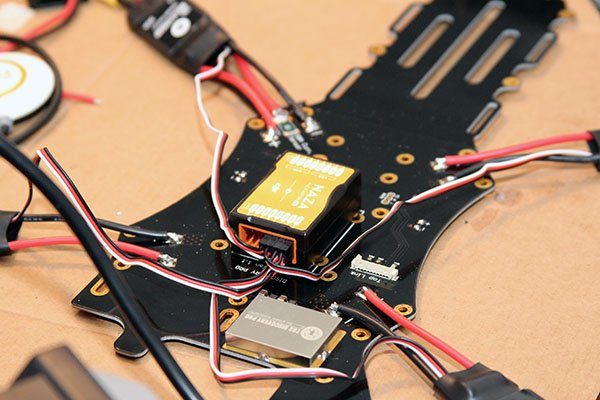
Si l’on s’en tient au manuel du TBS Discovery Pro, le châssis du quadricoptère est assemblé après la nacelle destinée à la caméra. Les points de soudure se recouvrent d’étain, la batterie est reliée par son connecteur, les entretoises vissées et les quatre contrôleurs de vitesse soudés. On en vient ensuite à relier le contrôleur de vol Naza ainsi que les câbles servo correspondants.
Après avoir géré la majeure partie de l’électronique, l’étape suivante consiste à fixer les bras et maintenir les contrôleurs de vitesse en place grâce aux serre-câbles évoqués plus tôt. Les moteurs viennent se fixer sur les bras grâce aux vis fournies (peu importe le sens dans lequel ils tournent à ce stade). Un peu plus loin dans le montage, il est possible de les alimenter et les tester sans hélices : il suffit alors d’inverser les connecteurs sur le contrôleur de vitesse pour modifier le sens de rotation du moteur.

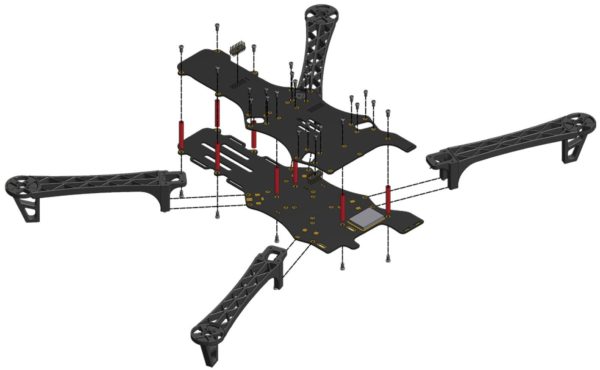
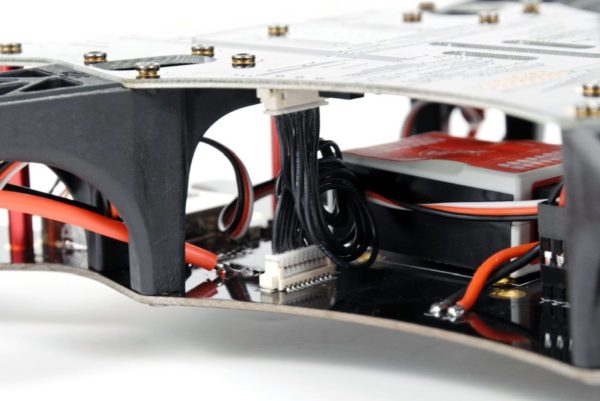
La plaque supérieure vient prendre les bras, les entretoises et le contrôleur de vol en sandwich. Si l’on utilise des canaux à modulation de largeur d’impulsions (PWM), il est nécessaire de faire des connexions entre les deux plaques pour le cheminement des signaux. La modulation en position d’impulsions (PPM) reste cependant préférable pourvu que l’équipement soit compatible, comme c’est notre cas : l’information correspondant aux huit canaux traverse via le câble de liaison TBS, lequel gère aussi le signal de la sonde électrique, le +5V/12V, la prise terre et enfin les informations relatives à la tension de la batterie.
Pourquoi est-il nécessaire de passer de la plaque supérieure à la plaque inférieure ? Les commandes atteignent le quadricoptère via son récepteur (dans notre cas, un ImmersionRC EzUHF RC Rx longue portée), traversent la plaque supérieure avent de descendre à l’étage inférieur pour enfin atteindre le contrôleur de vol Naza-M. On ne fait donc que connecter les différents sous-systèmes.

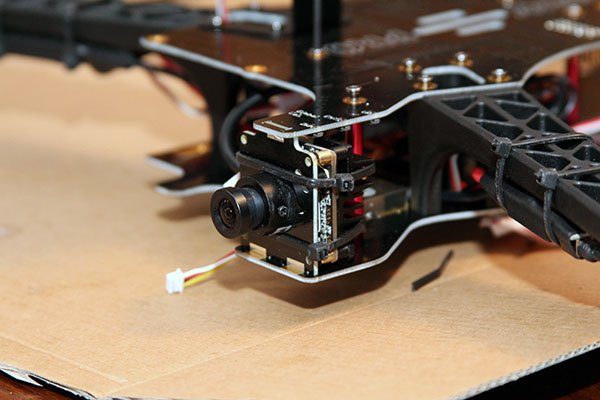
À ce stade, on tient quelque chose qui ressemble à un multirotor. Manque toutefois ce qui concerne le FPV, c’est-à-dire la caméra et les composants rendant possible le pilotage en vue subjective. Nous avons donc monté et câblé la caméra TBS 69 FPV avant de faire de même avec le transmetteur vidéo LawMate. Au sol, un récepteur distribue le signal vidéo pour le relayer aux lunettes ainsi qu’à un écran LCD, permettant ainsi de ne pas être le seul à profiter de l’expérience. En parallèle, nous avons attaché une GoPro Hero2 qui ne demandait qu’à être utilisée : celle-ci permet d’enregistrer nos sessions de vol en plus haute définition. Précisons que le TBS CORE permet, grâce à un circuit logique, d’inverser les rôles à distance entre 69 FPV et GoPro.
Comme on peut l’imaginer, ce bref descriptif du montage saute bon nombre d’étapes déterminantes : les vis doivent maintenues en place avec du frein-filet, le module GPS doit être monté sur son support, le centre de gravité doit être optimisé afin que les quatre moteurs puissent avoir un rendement optimal … Il y a beaucoup à faire, mais le guide d’installation et les vidéos couvrent tout : il ne faut pas se laisser décourager par la complexité apparente.
Notre avis sur le TBS Discovery Pro
Commençons par l’emballage et la présentation : le Discovery Pro va vraiment à l’essentiel puisqu’au déballage, il se résume à quelques planches en fibre de verre, des vis, un châssis et les composants modulaires qui sont vendus séparément sur le site de la marque. De ce point de vue, il y a clairement une similitude avec le PC. Cependant, plusieurs mesures ont été prises en vue de simplifier le montage, ce qui se traduit par un produit final plus propre. La majeure partie du câblage est directement assurée par le châssis, de telle sorte que l’alimentation ainsi que certains signaux de contrôle passent de l’étage inférieur à l’étage supérieur via une seule et même nappe. L’affichage à l’écran du TBS CORE et la sonde d’alimentation sont intégrés, ce qui éviter d’avoir à souder puis isoler soi-même ces composants. Bien que TBS ait pris un coup de chaud pour avoir négligé la qualité des vis et des sangles dans le passé, la dernière version du Discovery Pro est assez complète.
Fournissant des informations vitales sur le quadricoptère via le flux vidéo de la caméra pilote, le module CORE est le seul composant que TBS installe avant expédition. S’il est possible de trouver bon nombre d’interfaces utilisateur alternatives, un consensus semble se dégager quant au fait que CORE propose l’essentiel, notamment la tension de la batterie, la consommation en mAh, un décompte de la durée du vol et un indicateur relatif à la puissance du signal R/C. D’autres interfaces peuvent proposer distance-mètre, indicateurs relatifs au point d’arrivée et traceur de vol, mais ces fonctionnalités ne sont pas indispensables. Certains vont même jusqu’à les considérer comme nuisibles à la concentration. Quoi qu’il en soit, le lien d’interface graphique EzUHF embarqué dans le plateau supérieur du Discovery Pro permet d’extraire des informations supplémentaires en liaison montante sans nécessiter de configuration particulière. Ces données sont directement envoyées au module CORE via les pistes du PCB.

Si l’on imagine très bien un passé récent dans lequel il fallait être très attentif à la tension en sortie de la batterie ainsi qu’à la consommation d’un quadricoptère, nous n’avons absolument jamais eu de problèmes à ce niveau. TBS a préconfiguré notre multirotor pour du 5 V, après quoi nous avons exclusivement utilisé les câbles fournis pour brancher les composants du kit. Voilà une des raisons qui nous ont poussés à prendre le kit de TBS : le fait de savoir que la compatibilité des composants a été étudiée élimine le jeu de piste (et les calculs) auquel on peut être soumis au stade de la prospection. Par ailleurs, au cas où l’on souhaiterait sortir des chemins battus, trois boutons permettent de naviguer facilement au sein du menu système de CORE via un écran au sol ou des lunettes, sachant que l’on peut modifier les réglages originaux de TBS.
Une fonctionnalité qui n’est pas proposée d’origine est la prise en charge du PPM (Pulse Position Modulation) pour la nacelle, mais il suffit de souder deux points sur la plaque supérieure pour y remédier. Passé cette étape, une seule prise permet de gérer le streaming séquentiel de huit canaux.
À en juger par le niveau d’intégration, le Discovery Pro est le fruit d’une longue expérience. En tant que base, il s’agit d’un excellent produit, ce qui est accessoirement stimulant lorsque l’on a l’habitude de monter soi-même des PC. Un des rares critiques que l’on puisse faire tient aux vis sans tête qui maintiennent le moteur d’inclinaison en place : à chaque fois que le gyroscope travaille contre une force contraire, un jeu suffisamment conséquent pour nécessiter un reserrage peut être engendré du fait qu’elles ne retiennent pas suffisamment l’arbre du moteur. À en juger par les retours d’expérience sur les forums, nous avons manifestement eu plus de mal que d’autres à gérer la calibration de la nacelle ainsi que la communication avec cette dernière. Fort heureusement, le site de TBS propose une FAQ qui traite des principaux problèmes. Pour le reste, l’entraide au sein de la communauté nous a tirés d’affaire.
Le TBS Discovery Pro sous l’angle logiciel
La fin assez brutale du guide utilisateur du TBS Discovery Pro nous a particulièrement surpris : nous nous sommes retrouvés avec un quadricoptère assemblé sur une table sans vraiment savoir quoi faire ensuite. Peut-être fallait il s’en douter, mais le fait est que le kit acheté n’accompagne pas l’utilisateur de manière cohérente de A à Z. Au lieu de cela, il nous a fallu parcourir plusieurs forums, consulter d’autres modes d’emploi et reproduire les étapes que d’autres ont su franchir avant nous.
Une fois encore, ce processus a été grandement facilité par l’apparition de vidéos sur YouTube, lesquelles proposent une bien meilleure transition entre l’assemblage matériel et la configuration logicielle. À défaut d’avoir pu en profiter lorsque nous nous sommes lancés, il a fallu batailler pour configurer la radiocommande FrSky Taranis (très riche en possibilités à ce niveau), laquelle communique avec le contrôleur de vol DJI Naza via le récepteur EzUHF sachant que ces trois composants ont chacun leur propre utilitaire logiciel. En comparaison, il a été beaucoup plus simple de récupérer le flux vidéo de la caméra 69 FPV bien que nous ayons eu quelques difficultés à stabiliser les moteurs de la nacelle, ceux-ci ayant été sujets à des cliquetis. Pour être tout à fait honnêtes, les quelques difficultés restantes à ce stade nous ont conduits à provisoirement mettre de côté notre projet de multirotor.
Cette interruption nous a aidés à sous-diviser les opérations de montage complexes pour les régler une par une. La plupart des composants s’assemblent dans un ordre logique, mais le processus de construction consiste plus à travailler sur des surfaces réduites que de paramétrer des fonctions spécifiques du début à la fin. En conséquence, les dernières opérations délicates nécessitent une approche différente.
Liaison radio : FrSky et ImmersionRC
Le contrôle du Discovery Pro est assuré par l’ensemble radiocommande FrSky Taranis X9D, module émission EzUHF ImmersionRC et contrôleur de vol DJI Naza-M V2. C’est par ailleurs au niveau de ce trio que le multirotor nécessite la majeure partie de sa configuration logicielle.
Lorsque nous avons reçu notre kit longue portée, la radiocommande Taranis X9D était configurée pour communiquer sur la bande 2,4 GHz. Pour améliorer sa portée, il fallait ajouter un module ImmersionRC EzUHF JR, lequel est capable de délivrer jusqu’à 500 mW sur une plage allant de 430 à 440 MHz. Naturellement, la Taranis X9D est compatible avec le standard JR, ce qui nous a donc permis de retirer facilement son cache arrière pour aligner les points de contact et enfin insérer le module dans la radiocommande (précisons qu’un défaut d’usinage ne nous a pas permis d’assurer un parfait maintien du module).
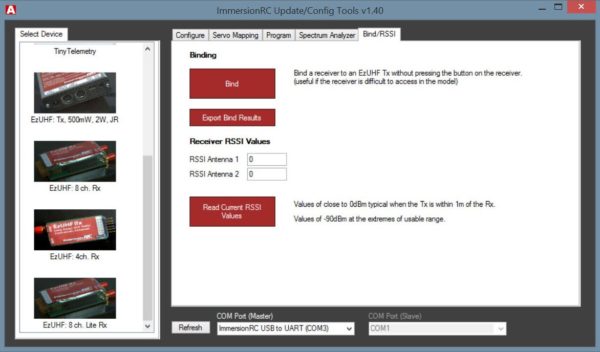
De la même manière, la connexion du module via USB à notre Lenovo Helix puis sa configuration logicielle s’est faite sans encombre, tout comme celle de l’ImmersionRC EzUHF longue portée RC RX, situé sur le Discovery Pro afin de recevoir les commandes du Taranis X9D. Les deux modules nécessitent une correspondance au niveau de leurs firmwares respectifs (ce qui était déjà le cas à réception pour nous). L’utilitaire ImmersionRC Tools est là au cas où une mise à jour s’avèrerait nécessaire. Ce dernier facilite également la personnalisation des canaux de transmission, la configuration de l’ordre des voies, l’analyse du spectre radio en temps réel, la configuration des antennes et enfin le décompte des canaux. Précisons par ailleurs que la technologie PPM, que nous recommandons vivement, est également proposée par ImmersionRC Tools. Le fait de passer en PPM nous a permis de brancher le récepteur RC longue portée sur le TBS avec seulement deux servocâbles : un pour transmettre le signal PPM et l’autre pour passer d’une caméra à l’autre. Pour mémoire, la technologie PWM nécessite un câble par canal.
L’association du transmetteur au récepteur de manière à ce qu’ils puissent communiquer entre eux est une étape facile, semblable à l’association entre des appareils Bluetooth. Ce n’est clairement pas la liaison entre le pilote et le multirotor qui limite les possibilités dans le cas présenté.
La configuration de la radiocommande Taranis X9D est nettement plus longue, sans pour autant être pénible. Celle-ci propose des alertes sonores pour les réglages/valeurs/seuils que l’on souhaite, ce qui est particulièrement appréciable lorsque l’on porte des lunettes FPV. Par ailleurs, un système de modèles permet de récupérer la configuration d’un autre utilisateur de Discovery Pro. Celui-ci propose jusqu’à 16 canaux ainsi que de multiples possibilités de réglages. En clair, le degré de liberté est tellement conséquent qu’il faut nécessairement un certain temps pour l’appréhender.
Sur ce point, nous n’aurions jamais pu nous en sortir avec le manuel du FrSky comme seule source de connaissances. Même les tutoriels sur YouTube ainsi que les forums ne sont pas exhaustifs : il nous a fallu trois ou quatre sources différentes pour que notre Taranis X9D puisse fonctionner comme voulu. Bien entendu, on commence par les commandes basiques gaz (throttle), lacet (yaw), tangage (pitch), roulis (roll), mais il faut également ajouter l’inclinaison/rotation de la nacelle ainsi qu’un sélecteur caméra FPV/GoPro. La dernière difficulté consistait à personnaliser le commutateur de vol à trois positions afin d’avoir accès aux modes GPS, altitude et manuel du Naza-M, tout en sachant qu’un autre interrupteur permet de passer au mode Failsafe. Précisons qu’après avoir effectué tous ces réglages, il nous restait encore à lire 10 des 13 pages du mode d’emploi fourni avec le Discovery Pro.

Ceci étant dit, la Taranis X9D s’est montrée globalement très plaisante à l’utilisation. Le mouvement des manches inspire confiance, les commutateurs restent bien en place après un changement de position, l’écran LCD rétroéclairé de la radiocommande propose une navigation assez facile et son carénage est suffisamment résistant sans pour autant peser une tonne. Cependant, on aurait apprécié le fait de pouvoir démonter l’antenne intégrée ainsi qu’une batterie Ni-MH de meilleure qualité. Signalons également que la Taranis 9XD s’appuie sur des logiciels libres, ce qui permet donc à n’importe qui de télécharger le code source pour le modifier à l’envie. Enfin, cette radiocommande est nettement moins chère que les modèles concurrents chez Futaba, ce qui nous a permis de faire des économies non négligeables.
Contrôleur de vol : DJI Naza-M V2
Comme évoqué lors du précédent article portant sur les multirotors, le contrôleur de vol est en quelque sorte l’ordinateur central qui traite les commandes : il permet notamment de rendre le pilotage d’un multirotor possible en assurant l’équilibre de l’aéronef et en maintenant son altitude. Comme pour tous les autres composants de ce projet, il existe des alternatives au Naza-M dont plusieurs ont été abordées dans le premier article. Cependant, le produit de DJI est considéré comme étant le plus simple et donc celui qui permet de voler dans les meilleurs délais. À défaut de bien connaître MultiWii, KK2, ArduPilot ainsi que les autres solutions, nous nous sommes ralliés au consensus général. DJI propose également d’autres modèles comme l’A2 et le WooKong-M, mais TBS a choisi de ne proposer que la famille Naza pour ses kits Discovery Pro.
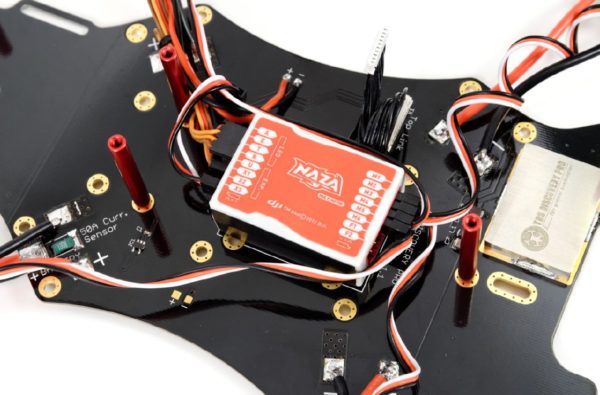
Le Naza-M est livré avec un boitier d’alimentation, un bloc de LED avec interface USB, un GPS ainsi qu’une documentation très complète. Pour aller à l’essentiel, le boitier d’alimentation prend une source 7-25 Volts en entrée pour sortir du 5V avec un maximum de 3 Ampères. Les LED indiquent le statut au travers de trois couleurs (rouge, jaune, vert) et différents types de clignotements, tout en proposant une interface avec un PC grâce au port microUSB. Bien entendu, le GPS se fixe sur les signaux satellites pour la triangulation. Au cas où la radiocommande perdrait le contact, le mode failsafe s’active (il est également possible de le déclencher manuellement en cas de problème) : le multirotor se maintient alors en état stationnaire pendant trois secondes et à défaut d’une reprise de contrôle, il revient à l’endroit où l’on a accroché un signal satellite et démarré les moteurs. Notons qu’à moins de 20 mètres, un multirotor montera en altitude avant d’effectuer le trajet automatiquement. Au-delà de 20 mètres, un multirotor maintiendra son altitude avant de revenir en direction du point de décollage, se mettre dans un état stationnaire pendant 15 secondes pour enfin atterrir. Voilà le genre de fonctionnalité bienvenue sur un quadricoptère à plus de 2000 €. Cependant, il ne faut pas s’en servir de béquille pour autant : une altitude de 20 mètres n’est pas très élevée et n’empêchera donc pas un multirotor de s’écraser contre un arbre, bâtiment ou poteau sur le chemin du retour.
Parmi les composants configurables du kit longue portée de TBS, le Naza-M V2 est le plus facile à gérer. L’assistant logiciel de DJI est admirable : bien qu’il propose plusieurs pages d’options, chaque réglage est suffisamment bien expliqué pour permettre au néophyte de comprendre l’effet engendré et son importance. Bon nombre d’utilisateurs chevronnés fuient certaines fonctionnalités du contrôleur comme l’alerte relative à une tension trop faible, ou le contrôle intelligent de l’orientation. En revanche, le mode Failsafe, les limites de vol ainsi que la calibration des manches sont autant de fonctionnalités très largement utilisées.
Certaines portions de l’assistant logiciel peuvent éventuellement paraitre plus obscures que d’autres malgré l’excellent travail de DJI, mais il ne faut pas se décourager pour autant. Pour prendre un exemple, les gains d’entrée dépendent du châssis, des moteurs, des hélices et du poids. Un débutant risque donc d’avoir toutes les peines du monde à trouver le bon équilibre, mais il y a forcément un autre utilisateur sur un forum ou YouTube qui possède le même matériel et peut partager son expérience. Pour peu que l’on ait la patience de chercher, on peut être certain de trouver les réglages de gain nécessaires pour voler. Notons que TBS propose des chiffres concernant le Discovery Pro et les moteurs 900 kV de la marque, mais ceux-ci se sont avérés inutiles puisque nous avons reçu des moteurs 1000 kV.
La nacelle
Il a également fallu parcourir plusieurs sujets sur les forums pour savoir pourquoi il ne faut pas toucher à l’onglet gimbal (nacelle) dans l’utilitaire de DJI. TBS affirme que sa nacelle est prête à l’emploi, mais la nôtre a nécessité quelques ajustements avant de passer aux canaux PPM. En fait, cette opération doit être faite dans un autre utilitaire, à savoir SimpleBGC.
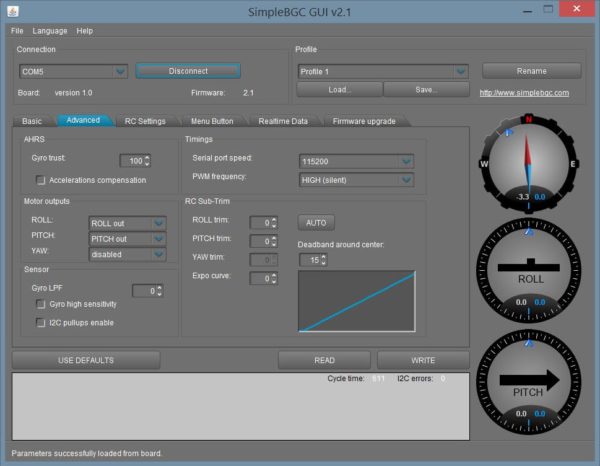
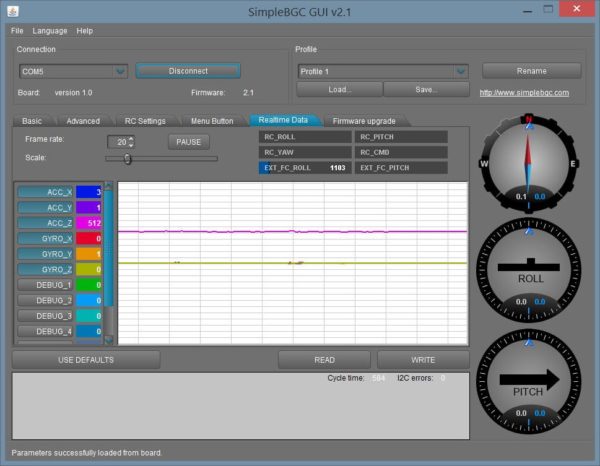
Le logiciel de BaseCam donne accès aux réglages PID (proportionnel intégral dérivé) du contrôleur, au contrôle du moteur, aux options R/C ainsi qu’aux données en temps réel de l’accéléromètre et du gyroscope. À l’heure actuelle, il faut faire attention à bien utiliser la version 2.1 du logiciel pour maintenir la correspondance avec le firmware du contrôleur.
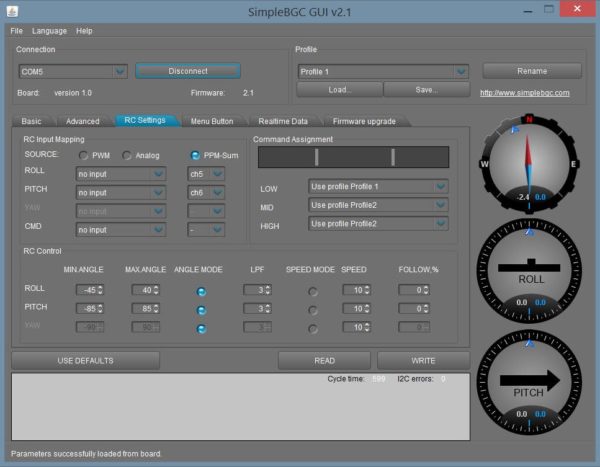
Théoriquement, il suffisait de passer du mode PWM au mode PPM dans Simple BGC pour terminer la configuration de la nacelle. Cependant, il nous a fallu aller plus loin dans le logiciel pour résoudre des problèmes de vibrations au niveau du moteur et de calibration décentrée. Nous en sommes venus à recharger les profils par défaut dans les deux cas, sachant que ceux-ci sont vraiment les mieux adaptés. SimpleBGC sert surtout à résoudre un problème que l’on ne peut pas repérer à l’œil nu.
Avec une nacelle enfin configurée pour accepter la commande de roulis sur le canal n°5 et le tangage sur le canal n°6 via PPM, nous avons pu passer à la suite des opérations. Précisons toutefois que notre configuration a été optimisée pour une GoPro Hero2. À la base, la compatibilité était assurée pour les GoPro Hero3, tout en sachant qu’une mise à jour récente a permis de prendre en charge la GoPro Hero4 moyennant un changement de composant.
FPV: Lawmate, Fat Shark et TBS
Pour avoir déjà piloté des aéronefs radio-télécommandés durant l’adolescence, nous connaissions déjà le plaisir que l’on peut avoir sous l’auvent d’un aérodrome à faire voler son avion en lui faisant suivre une trajectoire grossièrement rectangulaire, tout en faisant attention à toujours distinguer le nez de l’avion pour déterminer son orientation. Il suffisait de voler un peu trop loin pour avoir du mal à distinguer l’avant de l’arrière et nous avons donc vu plus d’un appareil s’écraser.

L’idée du FPV nous a stimulés parce que l’on s’affranchit de cette contrainte en montant virtuellement dans le cockpit. Bien entendu, le sous-système pour la vue subjective est d’une importance primordiale dans ce contexte. Nous avons donc choisir un transmetteur 2,4 GHz déjà réglé (TBS ne proposait pas encore Unify à ce moment), un récepteur lui aussi préréglé et l’option incluant une station au sol avec une batterie LiPo 5000 mAh 3S. Les lunettes vidéo Fat Shark Dominator viennent se brancher au récepteur via un long câble faisant transiter alimentation et signal vidéo. L’ensemble au sol est assez impressionnant.
À l’opposé des composants R/C, un sous-système FPV diffuse le signal vidéo depuis la caméra du quadricoptère via un transmetteur vidéo jusqu’au récepteur au sol. On peut ainsi observer le flux depuis un écran LCD, comme avec la station au sol de TBS, ou des lunettes FPV.

Cette chaine ne nécessite pas vraiment de configuration logicielle, mis à part les options que l’on pourrait vouloir changer dans le menu TBS CORE (par exemple le fait de passer d’une caméra à l’autre). L’initialisation est assez simple : il suffit d’assurer l’alimentation du transmetteur sur le châssis du Discovery Pro, choisir un canal via le sélecteur DIP, s’aligner sur le même canal au niveau du récepteur et enfin brancher ses lunettes FPV. Si l’on achète en plus une station au sol comme nous l’avons fait, un petit écran LCD permet à d’autres personnes de voir ce que l’on voit via les lunettes Fat Shark Dominator. Ces dernières peuvent être utilisées avec le long câble fourni ou bien, pour ceux qui voudraient plus de liberté, en sans-fil à condition d’ajouter un répéteur 5,8 GHz. Etant donné que l’on ne souhaitait pas s’éloigner de la station au sol, nous n’avons pas pris cette option.

La vue subjective est la caractéristique essentielle de cette expérience. Bien sûr que l’on prend déjà beaucoup de plaisir à faire voler un quadricoptère, de même que la possibilité de filmer à plusieurs dizaines voire centaines de mètres en hauteur permet une multitude de débouchés pratiques. Cependant, c’est bel et bien la vue subjective qui nous a de nouveau attirés vers les aéronefs radiocommandés après tant d’années. En s’appuyant sur ses propres produits et une sélection de références chez d’autres marques, TBS facilite les premiers pas de l’utilisateur et propose une expérience de très haute qualité. À l’heure où nous écrivons ces lignes, notre liaison vidéo n’est pas encore parfaitement claire et stable sur les longues distances, mais il y a suffisamment de pilotes capables de faire des allers/retours de plusieurs kilomètres avec les mêmes composants pour nous inspirer confiance. Un week-end supplémentaire devrait permettre d’éliminer les petits défauts restants.
Savoir être un utilisateur responsable
Peu après avoir reçu la NVIDIA Shield Portable (rebaptisée ainsi depuis la sortie de la Shield Tablet), nous nous sommes amusés à l’utiliser pour piloter un Parrot AR.Drone 2.0 avec succès. S’il est clair que nous étions impatients à l’idée de piloter le TBS Discovery Pro juste après l’avoir monté, la donne était tout de même assez différente : l’AR.Drone 2.0 coûte environ 280 euros, soit 8,5 fois moins que le multirotor assemblé pour cet article. Le Discovery Pro est capable de voler plus loin, ses moteurs susceptibles de causer des dégâts autrement plus importants et il était absolument hors de question que nos voisins puissent penser qu’on les espionnait. Nous avons donc attendu que le temps soit au beau fixe pour aller dans un champ suffisamment vaste et reculé afin de progresser sans mettre qui que ce soit en danger.

Le processus d’assemblage est attrayant, la configuration logicielle qui s’en suit peut être difficile, tandis que le pilotage en vue subjective est gratifiant. Mais il faut rappeler que la liberté d’exercer ce loisir ne va pas sans obligations : un aéronef qui vole assez haut avec des caméras HD peut être utilisé de manière illégale. Les abus de ce genre sont réprimés par la loi. Au-delà des potentiels cas voyeurisme, les médias ont récemment relayé une série de survols de centrales nucléaires par des multirotors. Dans un contexte où la législation s’adapte petit à petit pour répondre au renouveau de l’aéromodélisme, il est important de faire preuve d’un minimum de bon sens : les dérives d’une poignée de pilotes risquent de pénaliser toute une communauté à terme.
Team BlackSheep fait un assez bon travail pour ce qui est de réunir les composants additionnels d’autres marques et documenter le processus de construction. À force d’assembler nos propres PC, nous sommes complètement habitués à consulter régulièrement les forums pour chercher des informations : dans le cas présent, il s’agirait d’un retour d’expérience après un week-end de travail sur un Discovery Pro fonctionnel. Ceci étant dit, ce n’est clairement pas le modèle que l’on conseille pour débuter : le Discovery Pro est un ensemble de composants revenant à environ 2500 €. Sachant pour notre part qu’il subira au moins un crash tôt ou tard, il y a matière à réfléchir. En clair, mieux vaut commencer par un multirotor plus modeste pour devenir un bon pilote et ensuite passer aux multirotors haut de gamme. Vu la vitesse à laquelle TBS sort des composants améliorés et prodigue de nouvelles recommandations, il ne sera pas difficile d’arriver à une meilleure configuration que celle présentée aujourd’hui et, peut-être, un prix plus accessible.
L’album photo qui suit propose plus d’images sur le processus de montage.